RESEARCH & PROJECTS
Soft finger sensing the bending status, touch, grip force, slip, and surface texture. This made it possible for the finger to automatically control the grip force without visual information. This can be applied to biomedical application, and industrial application.
-Funded by National Research Foundation of Korea & Ministry of Science and ICT
-Won Minister of Science and ICT Award in Practical Research Competition (2 Million KRW)
-Target Journal : Soft Robotics(SoRo) -IF:6.16
To make computers more empathetic and obliging to the mental wellness of users, currently developing a real-time emotion recognizing system that enables a computer to sense the user’s emotional state with around 90% accuracy, and controls the peripheral environment for their emotional recovery.
-Target Conference : IMWUT 2022
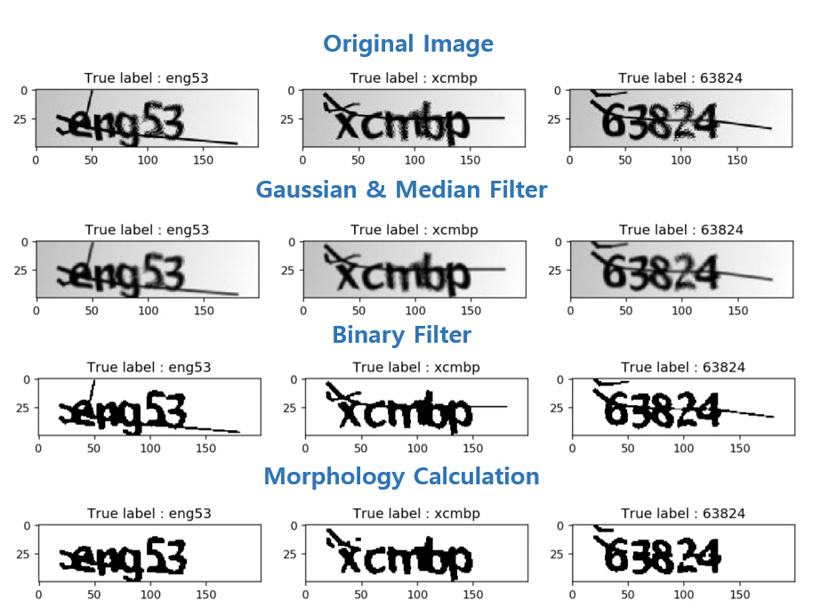
A system that can read distorted text images
● Wireless Chest-Laminated Ultrathin and Stretchable E-Tattoo (Aug,2019 - Dec,2019)
A wireless wearable device that can perform synchronous electrocardiogram and seismocardiography measurements and extract various cardiac time intervals including systolic time interval (STI) to track heart health.
LU Research Group Undergraduate Research Assistant, University of Texas at Austin
Brain Computer Interface As an Emotional Assistant
Target Conference : IMWUT 2021/2022
Motivation & Idea: These days more and more people are suffering from depression, stress and mental illness. Listening to the news about the people suffering depression due to COVID-19 quarantine, I was motivated to develop a system to help them. Also it's about time for the computers to care our mental health too.
Solution: Drawing from the "Valence-Arousal Model", we could build a system that measures bio-signals(EEG, PPG, GSR) to recognize the “inner” emotion (as humans could control their facial expressions). If it's classified as negative valence, provide feedback (e.g., playing music or controlling lighting conditions) to help bring the user's emotion back to the desired state.
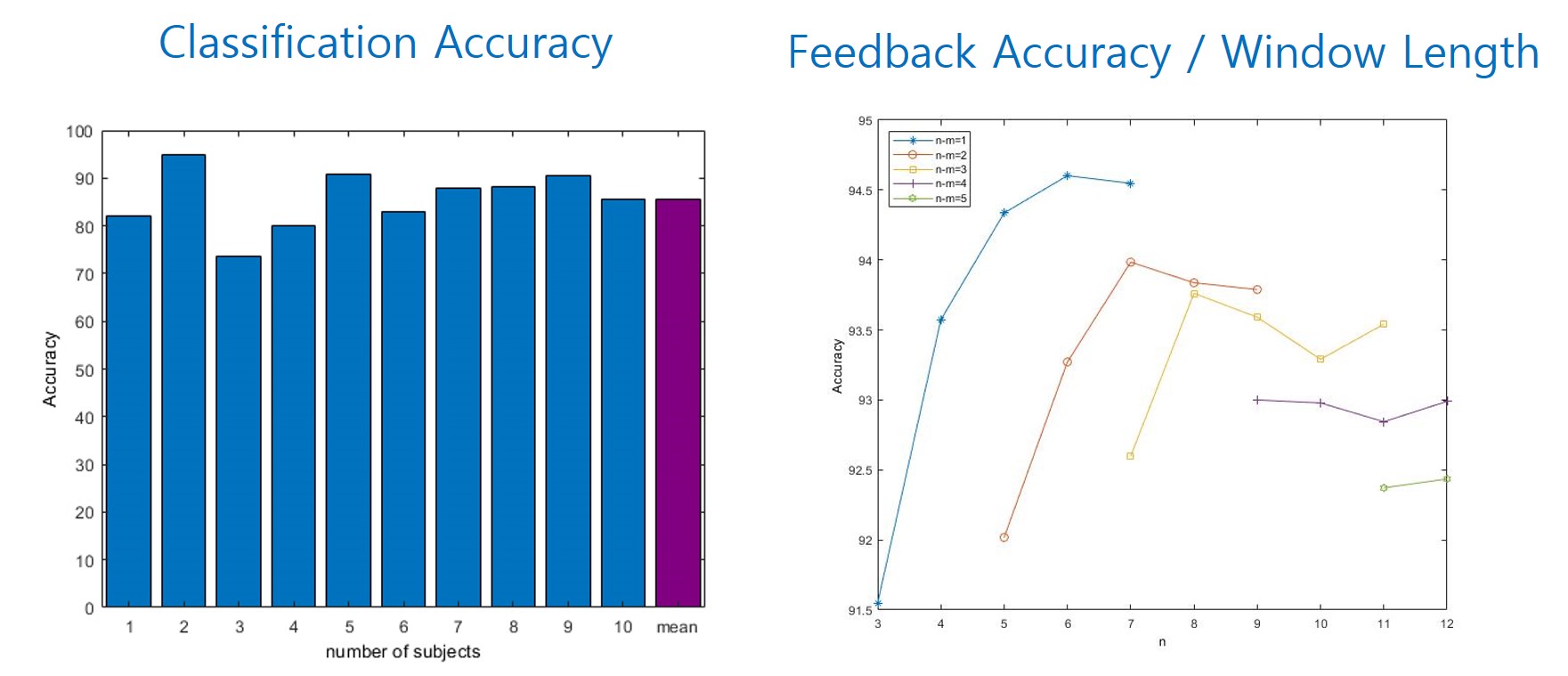
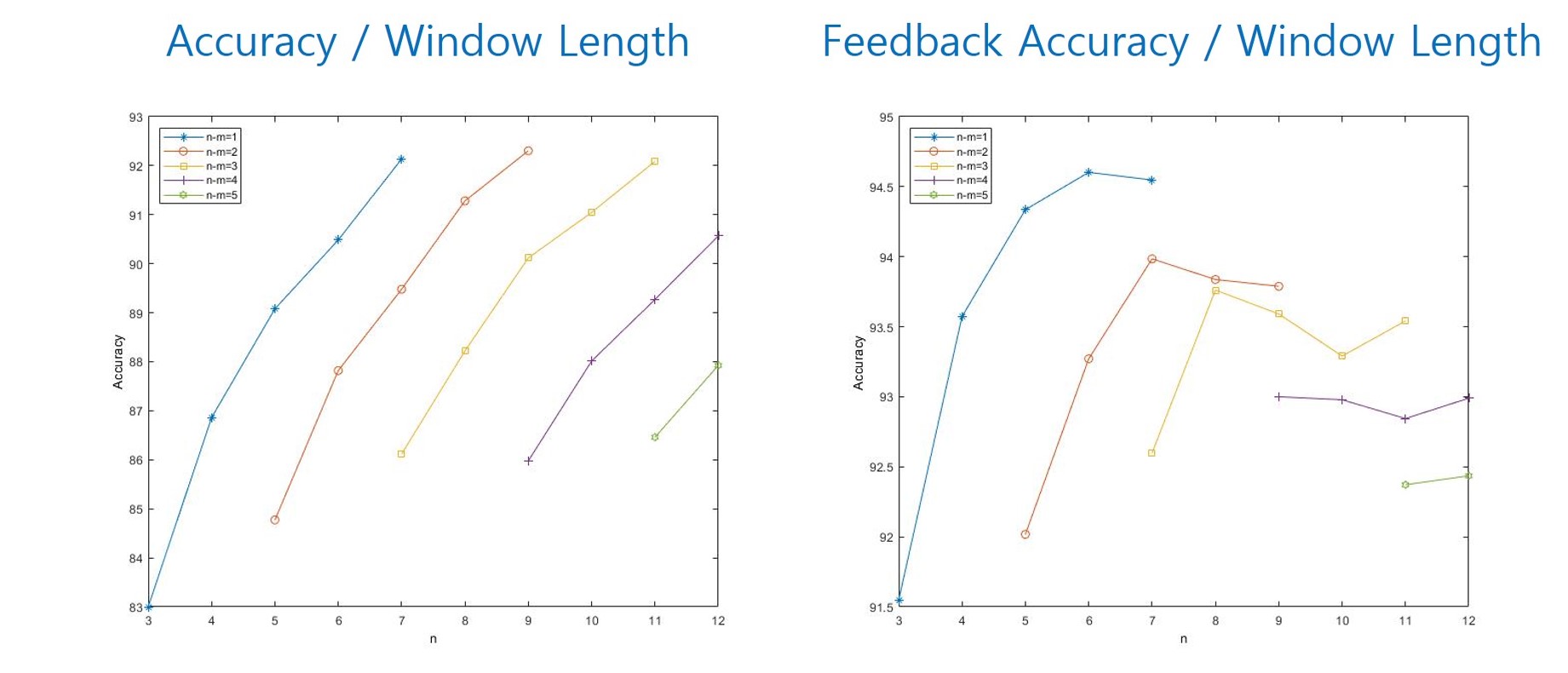
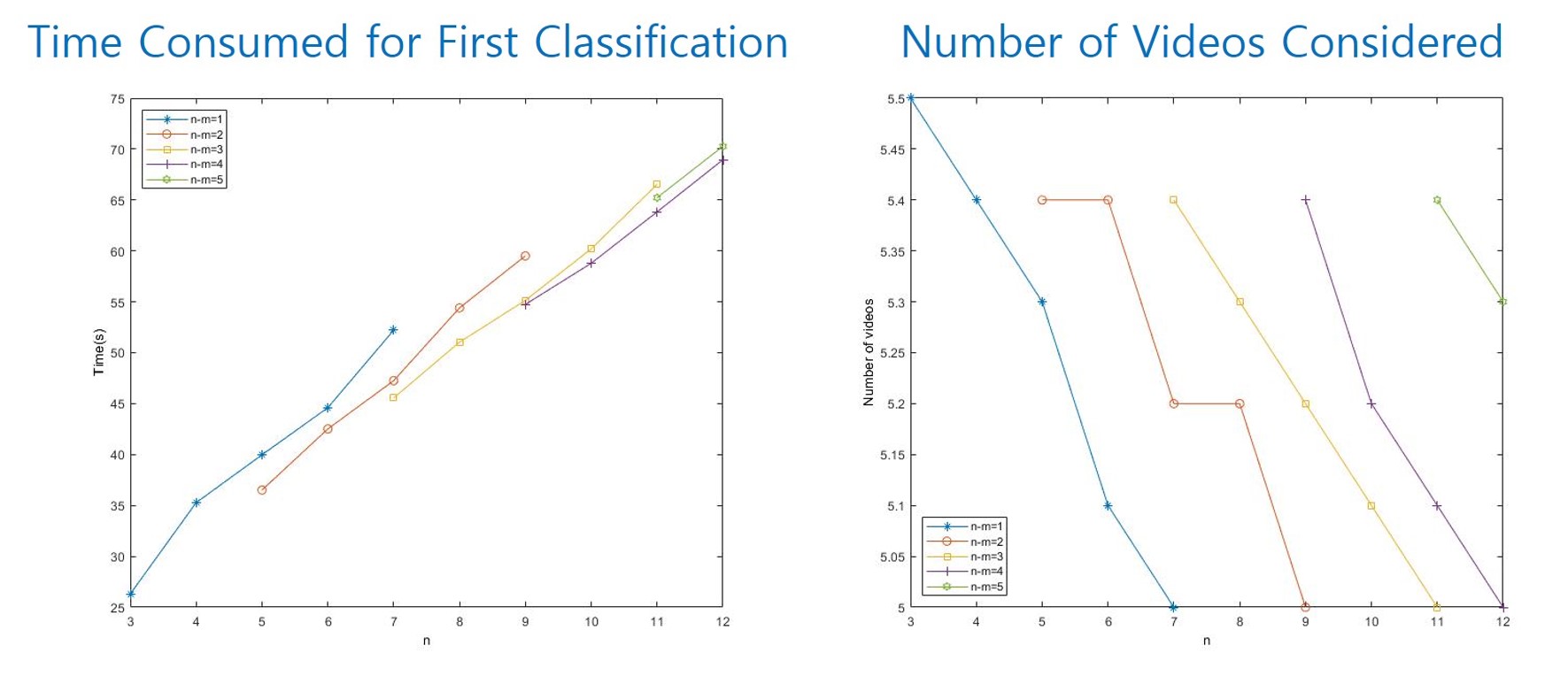
Method: Through experiment, collect EEG, PPG and GSR data, then epoch it after signal processing. I extracted features from them and built a classification model with SVM. Out of "n" number of windows in a row, system counts how many windows(m) are classified as positive or negative valence. If determined as negative valence, the system controls surrounding environments.
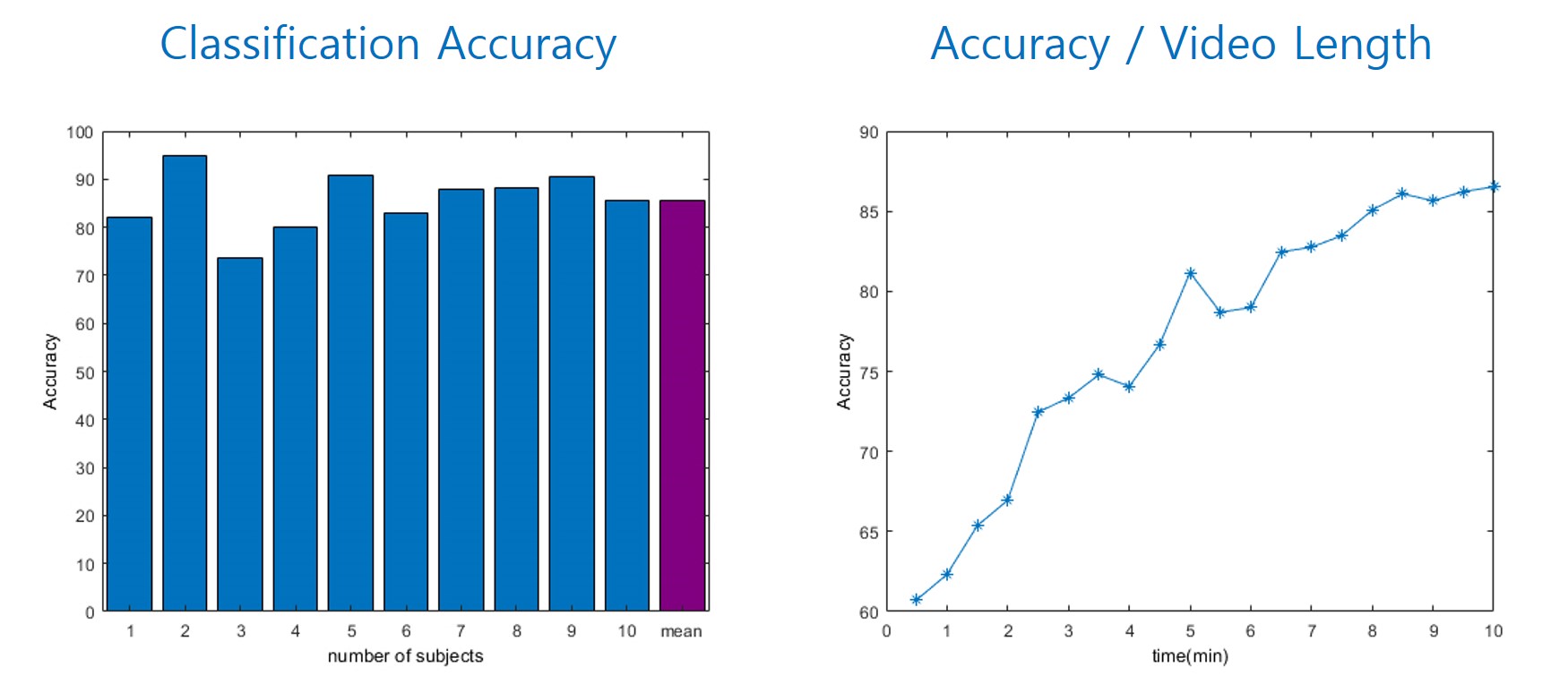
(Left) Overall classification accuracy, (Right) Accuracy per training data Length.
(Left) Overall classification accuracy, (Right) Accuracy per training data Length.
Currently accuracy of emotion classification is over 85%, and still working on improving the model. On-line experiment is planned to be held on September.
Throughout the Project...
Developed Matlab function :
1. Click here to download GSR feature extraction Matlab code
Future project idea : "I want to combine this empathic system to our daily devices so that the users can share their “actual” emotion with others and furthermore, with things."
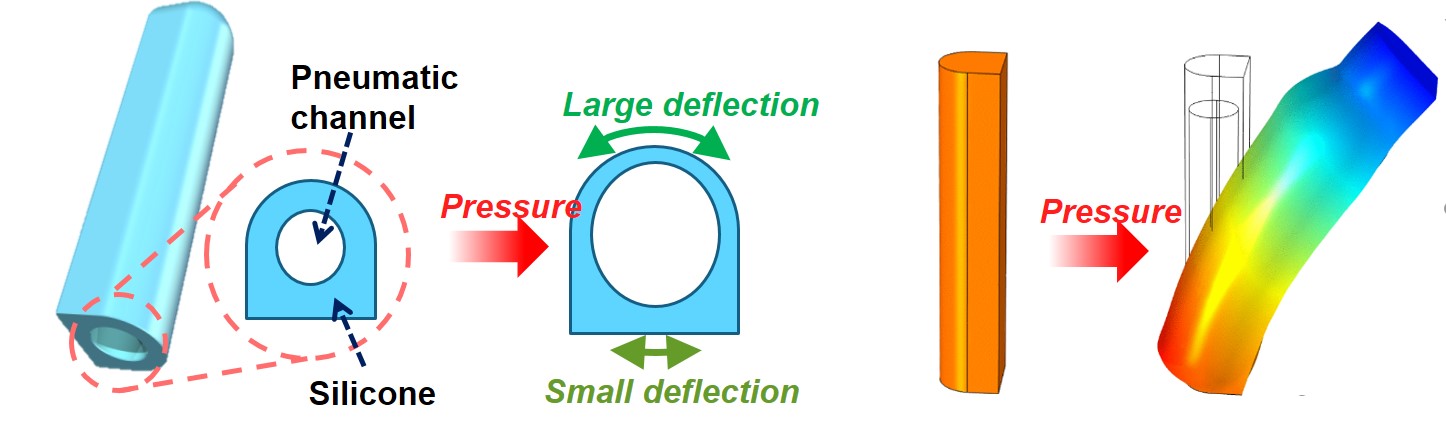
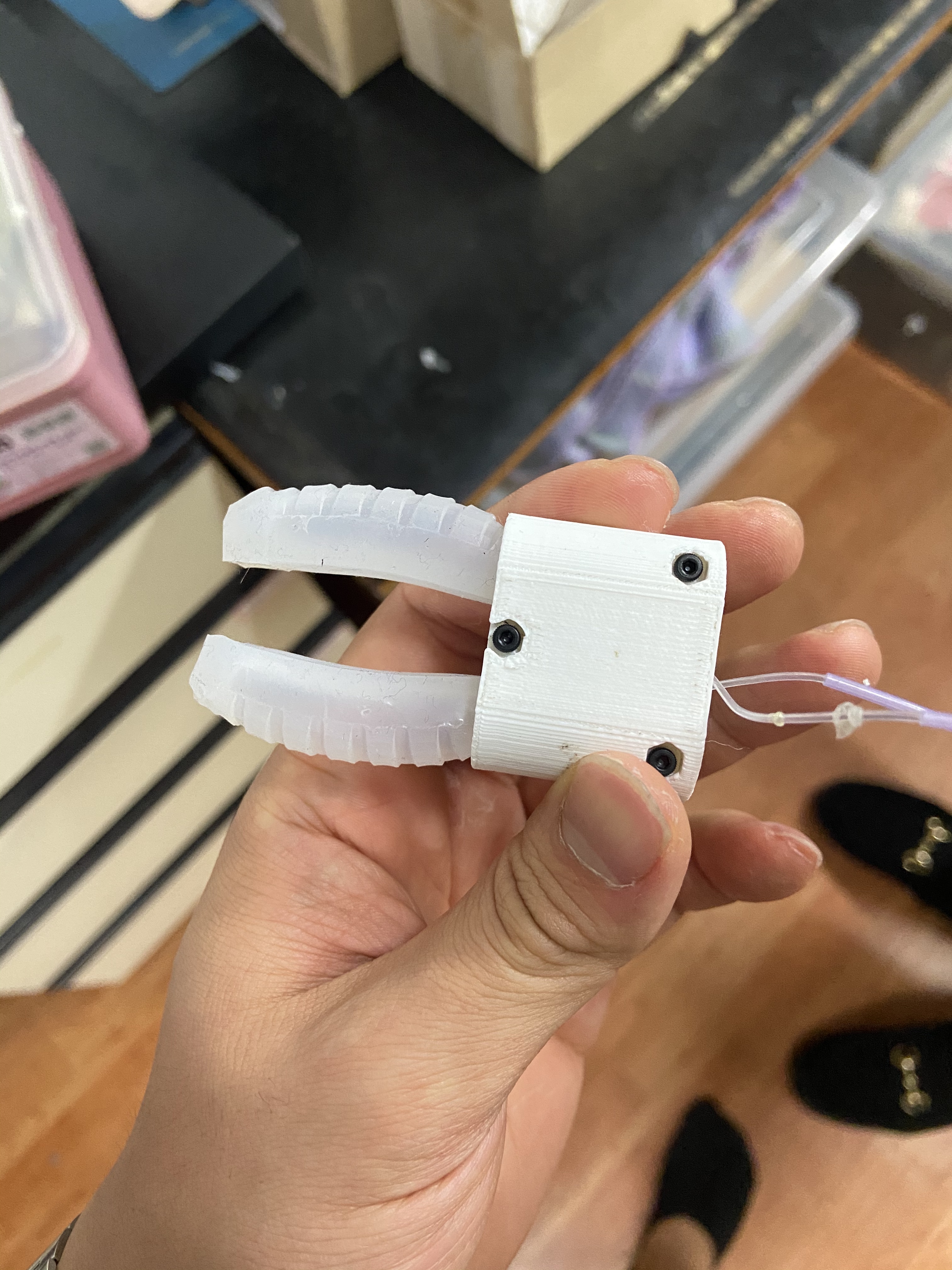
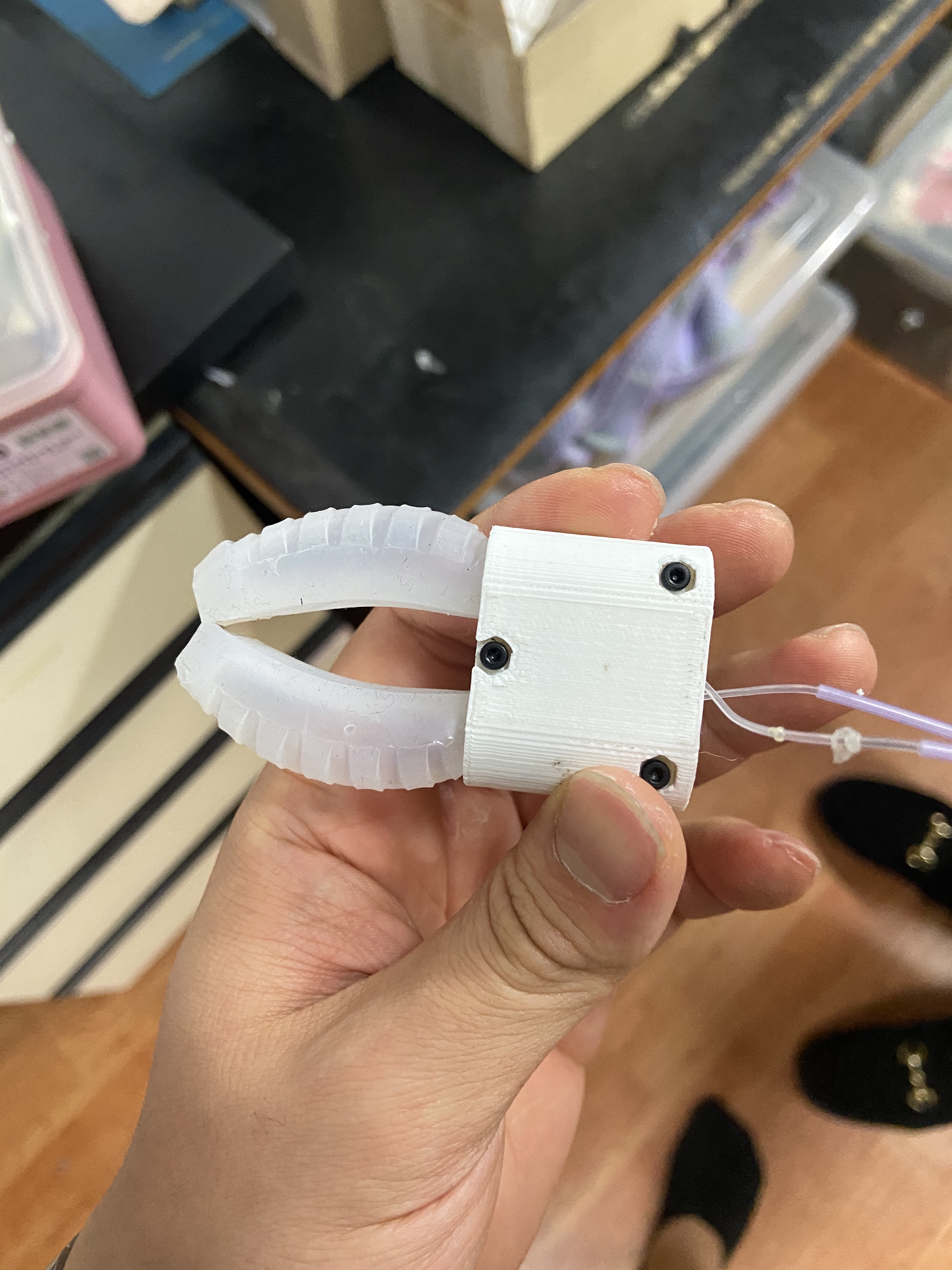
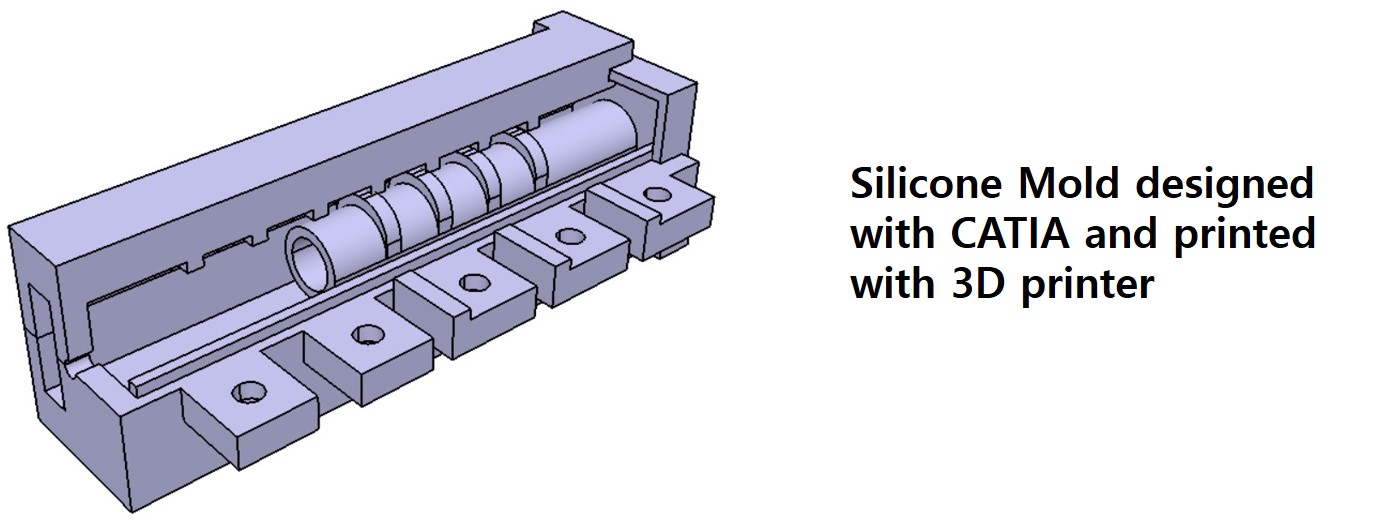
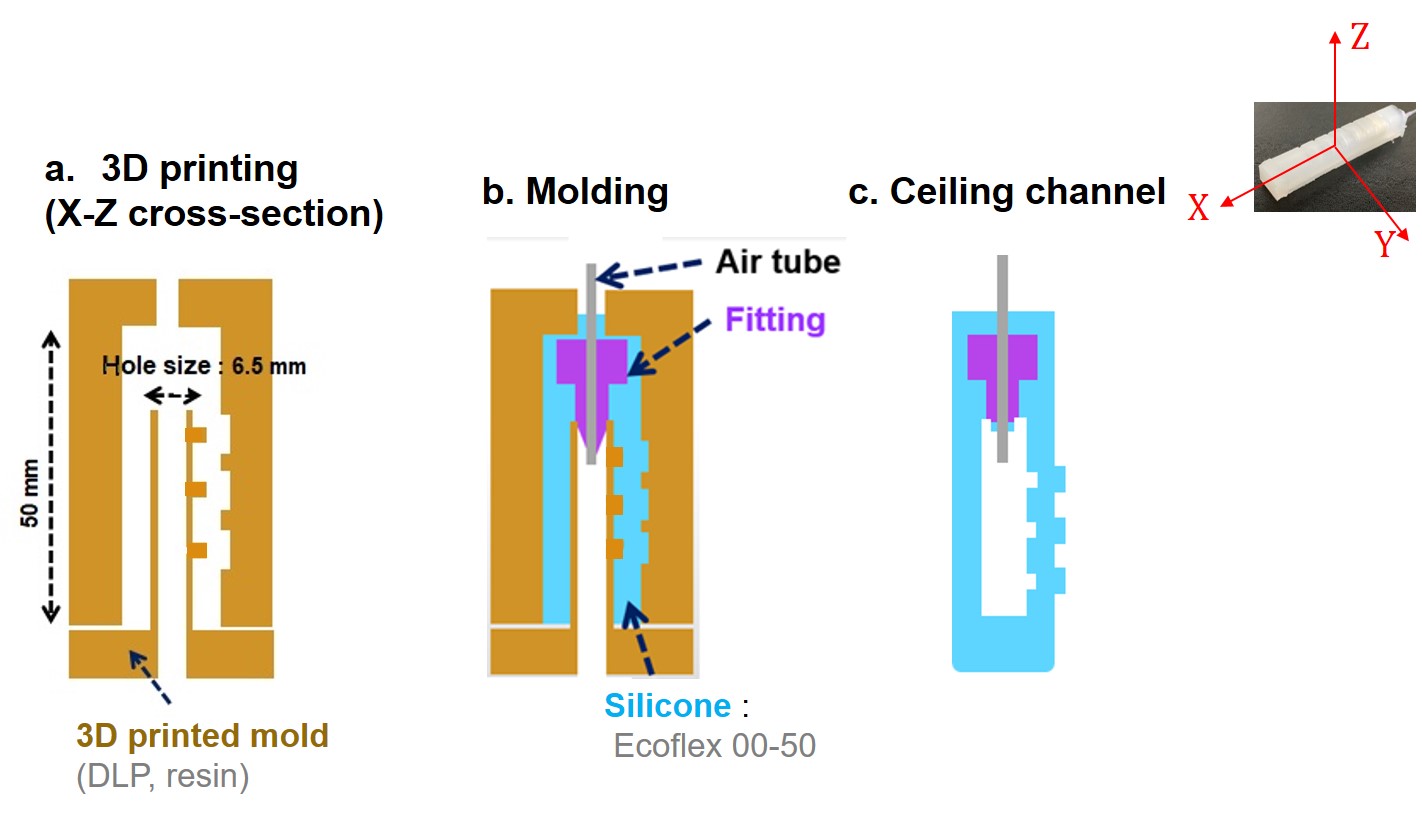
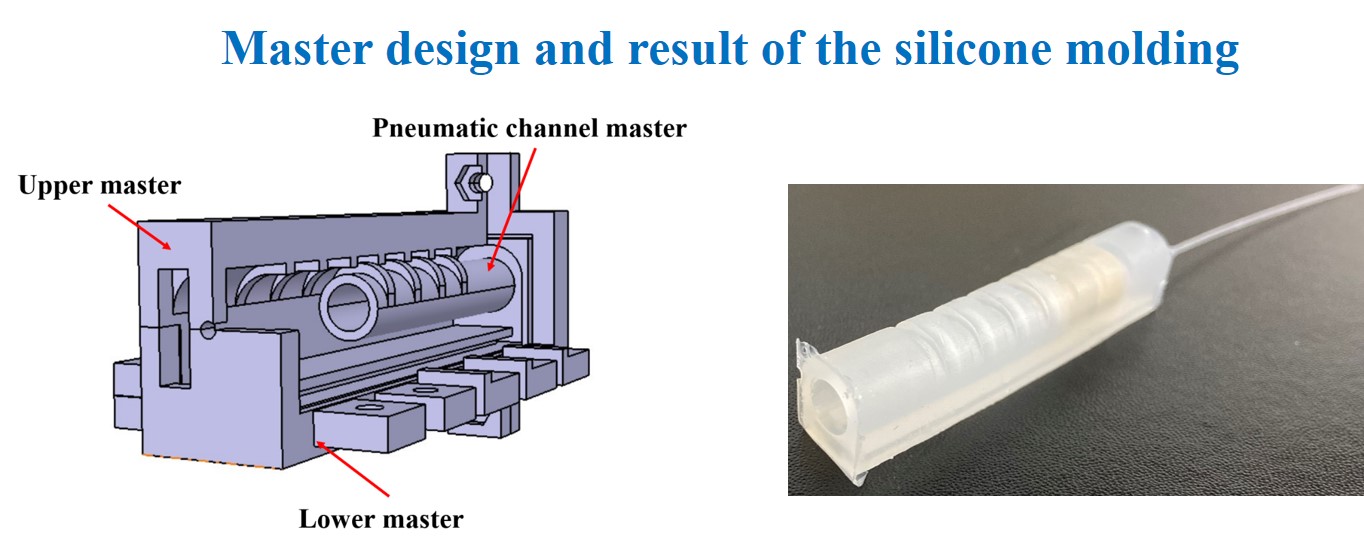
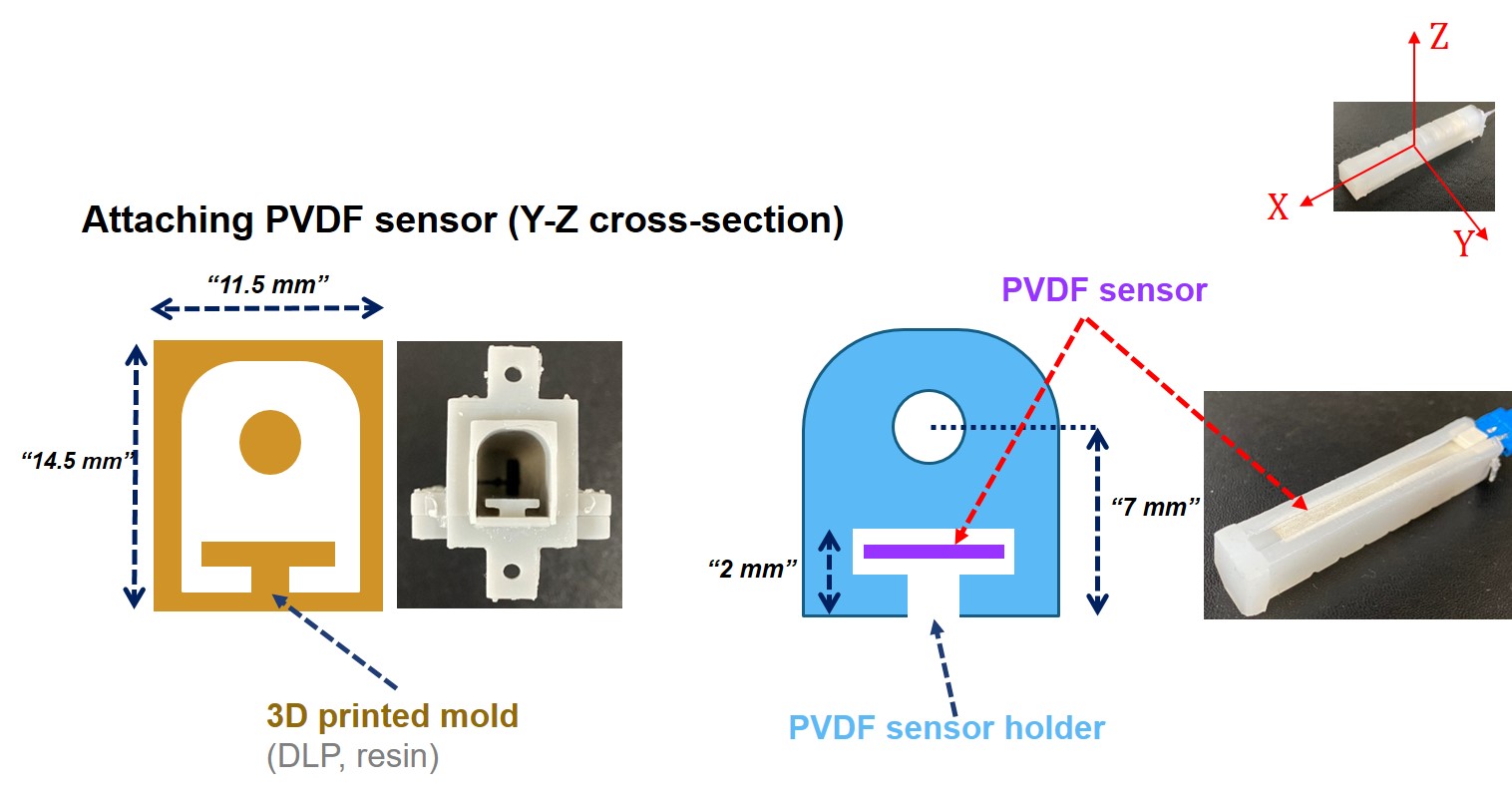
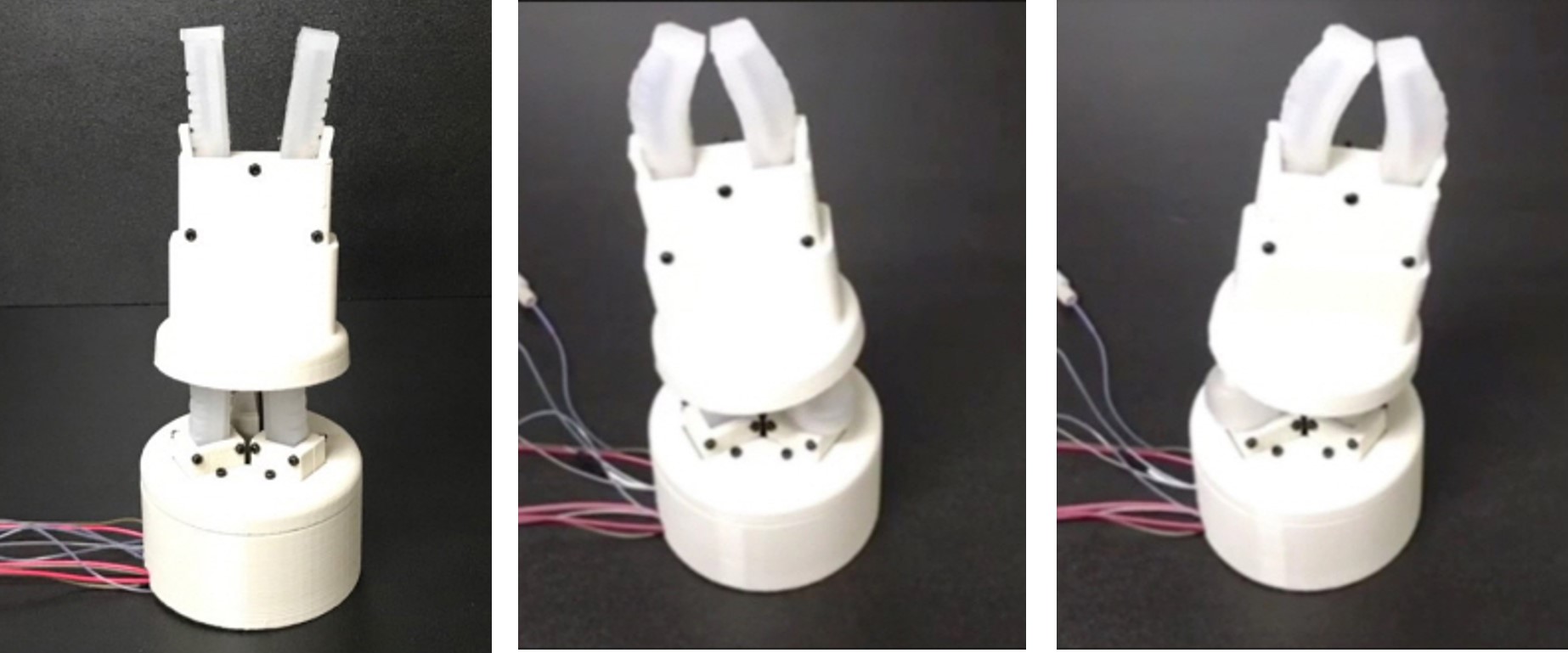
Sensing Soft Robot (Silicon Finger with PVDF sensor)
Content & Idea: I developed a soft robot arm with a piezoelectric sensor-based precisely controllable pneumatic finger, with the motivation to provide a physical platform for computers to interact with humans. When applied to Medical Robots or Medical catheters, minimum incision with soft movement will make interaction safer.
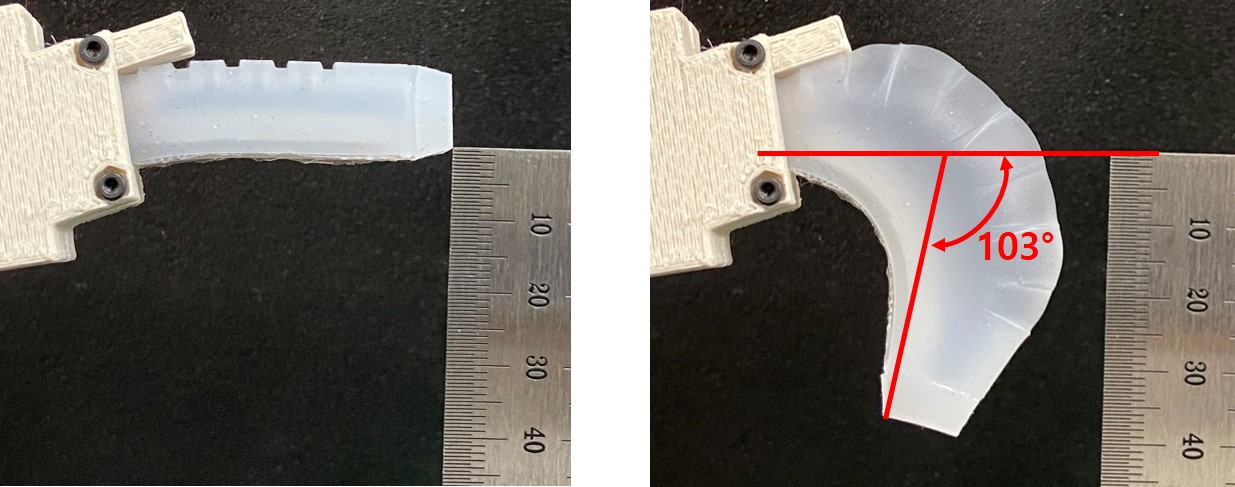
First Model(Without PVDF Sensor), ditch outside only
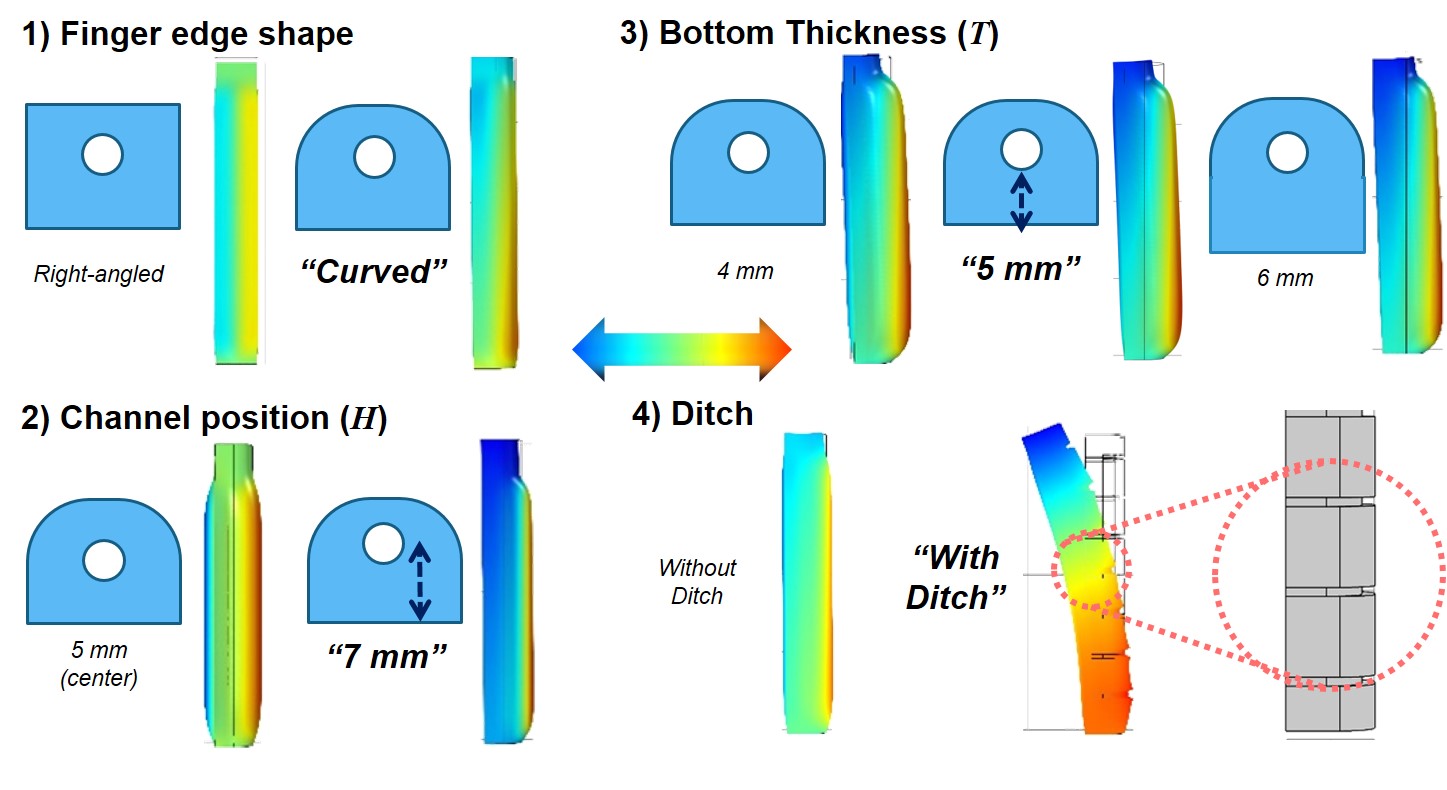
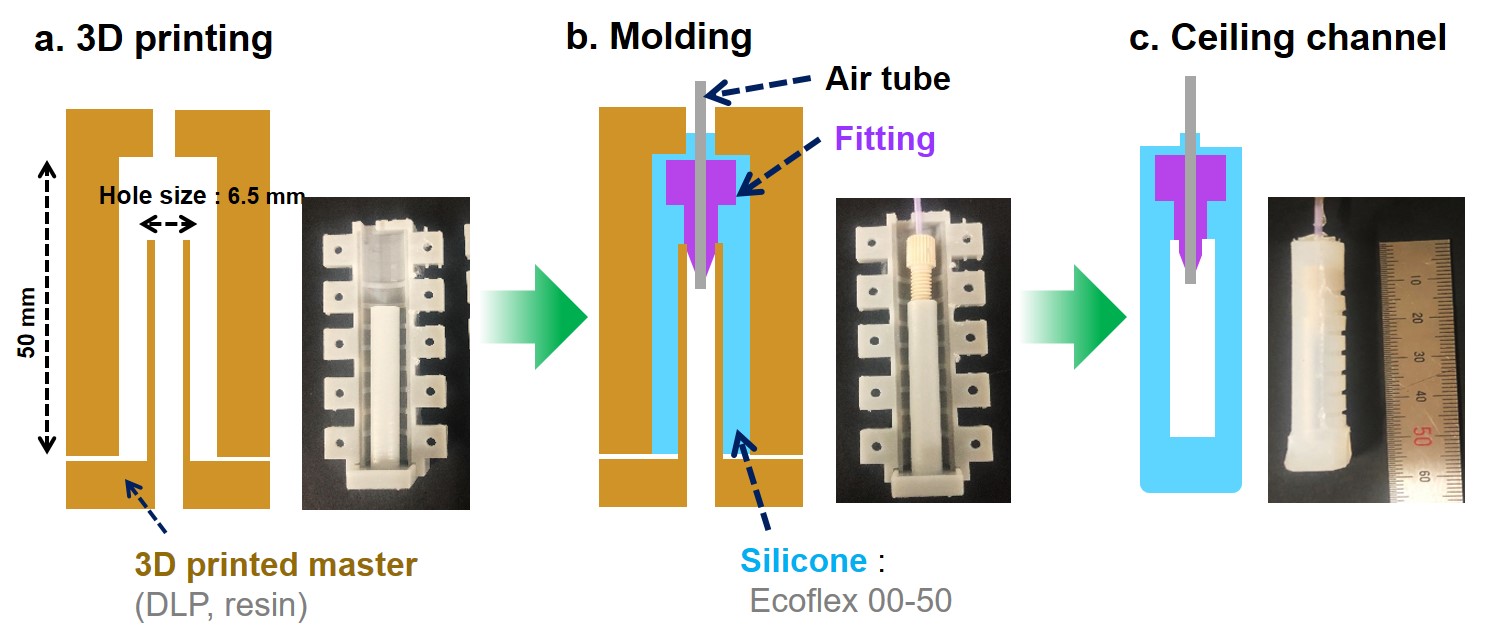


Second Model(Without PVDF Sensor) with ditch both inside and outside
Operation Characteristics.
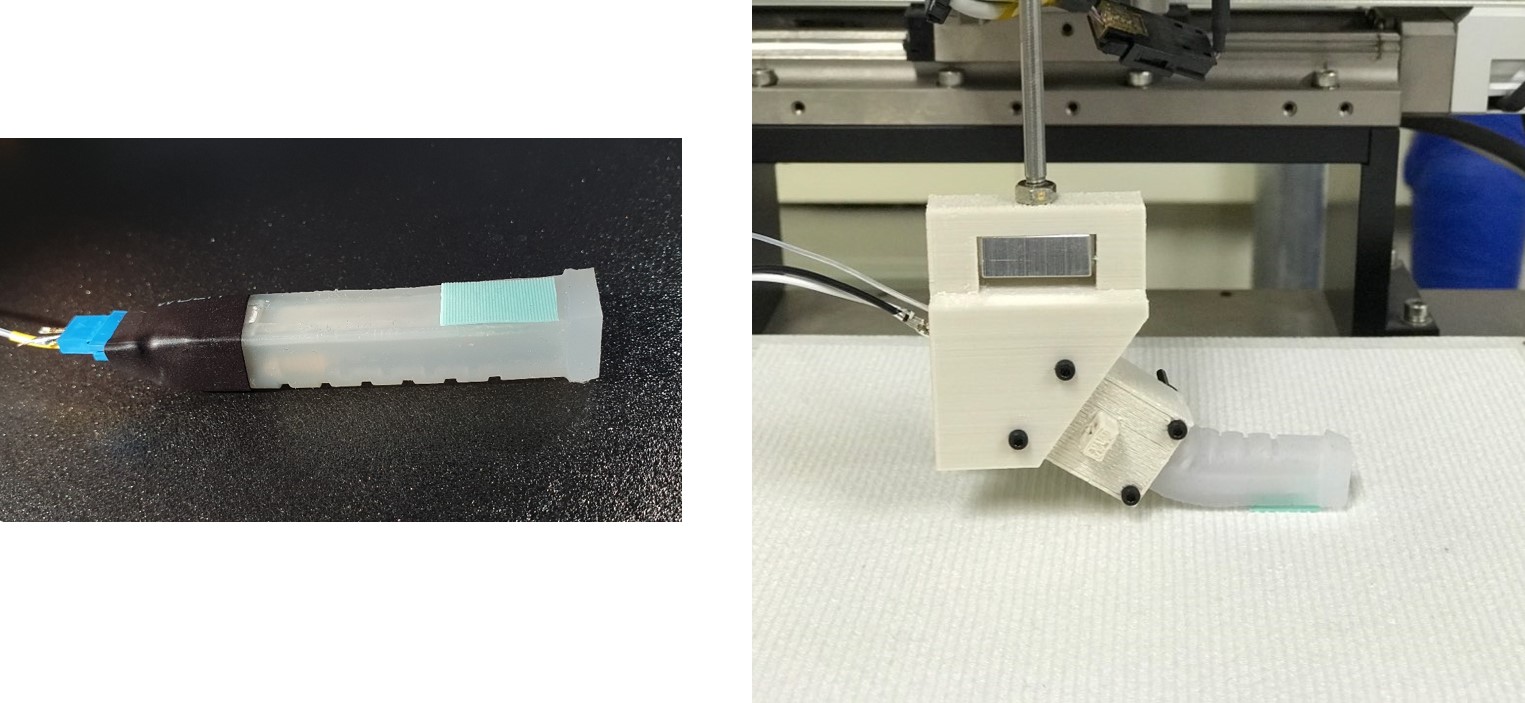
Third Model with Embedded PVDF Sensor

Fourth Model Fully Automated by PVDF Sensor
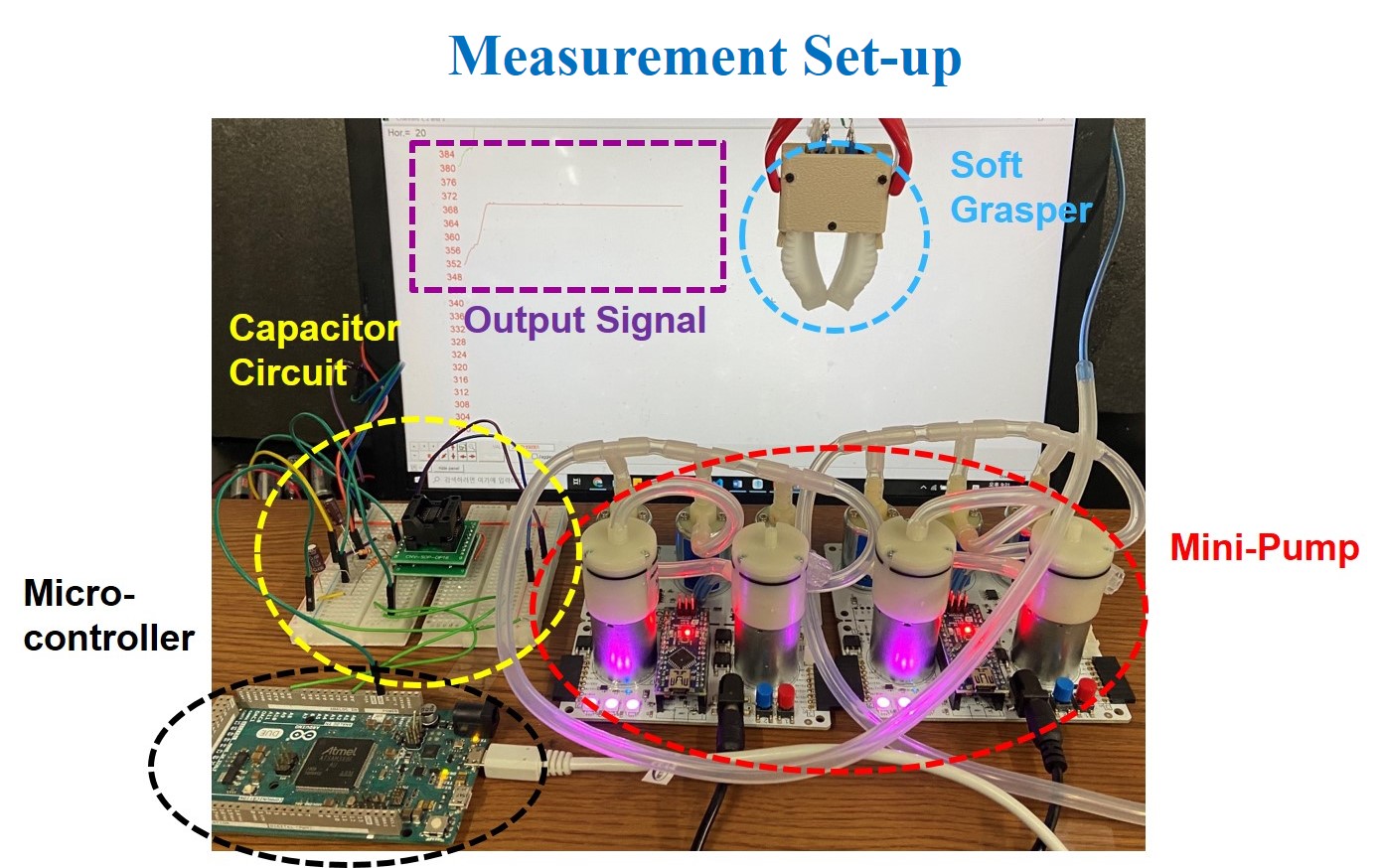
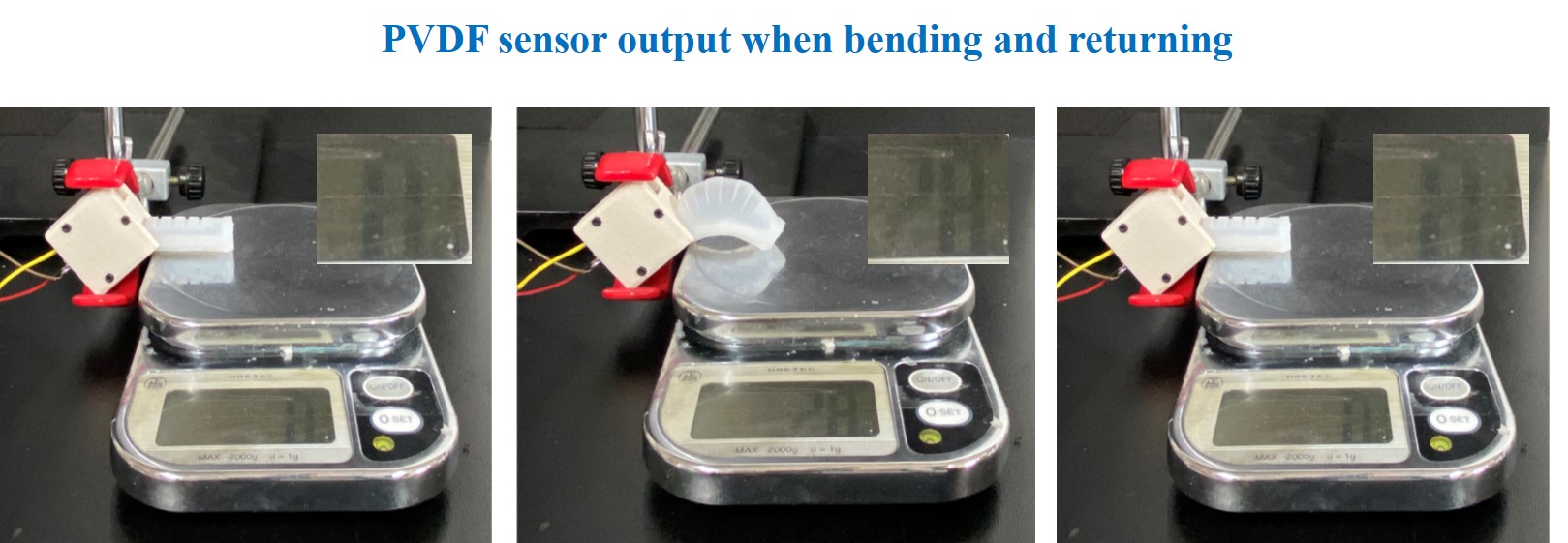
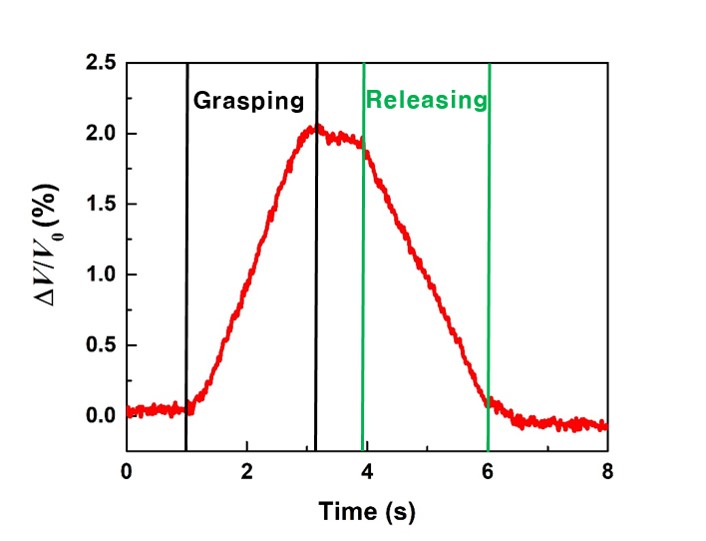
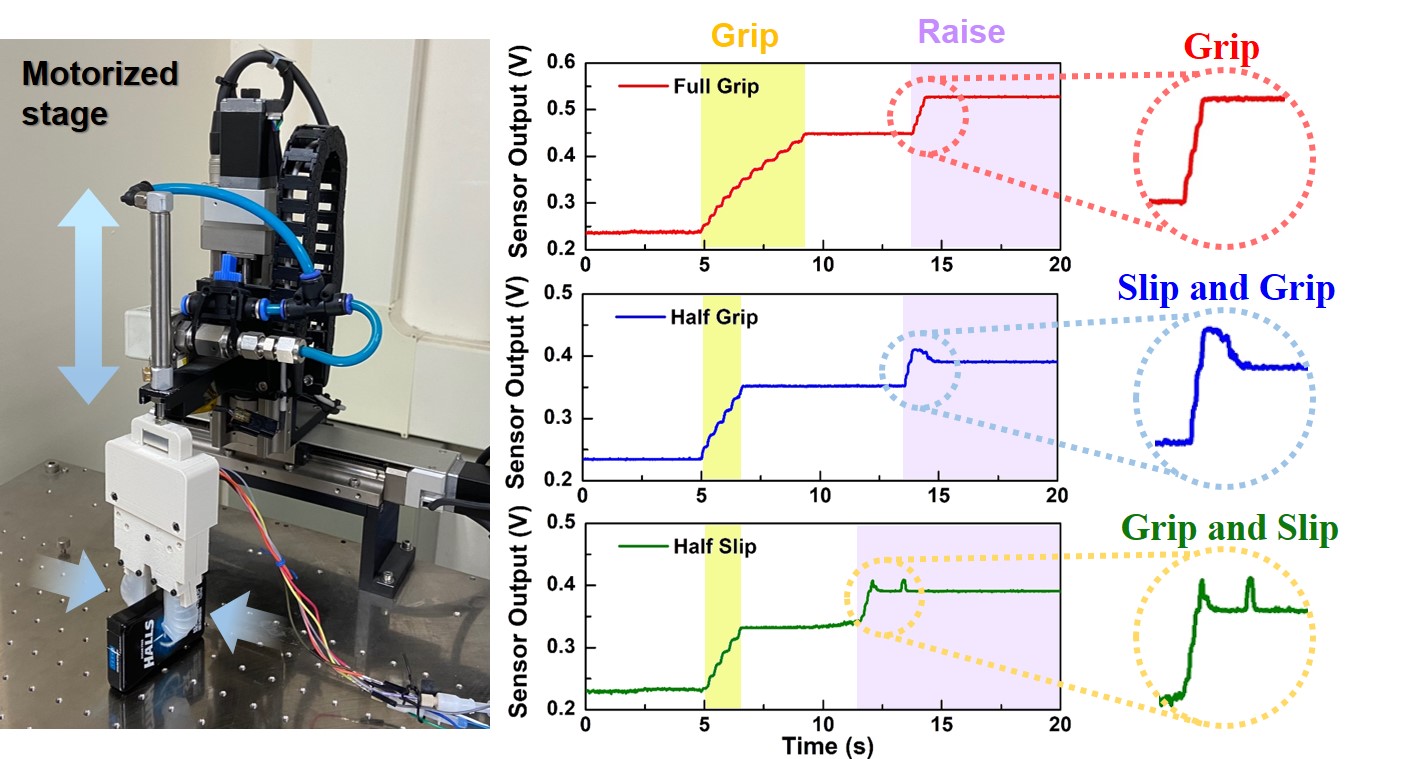
By monitoring the sensor output, and together with microcontroller, finger controls the grasping force automatically by stop inflating when it has grasped the item with enough force, based on its tactile senses. Also, if the gripping object slips, it applies additional force.
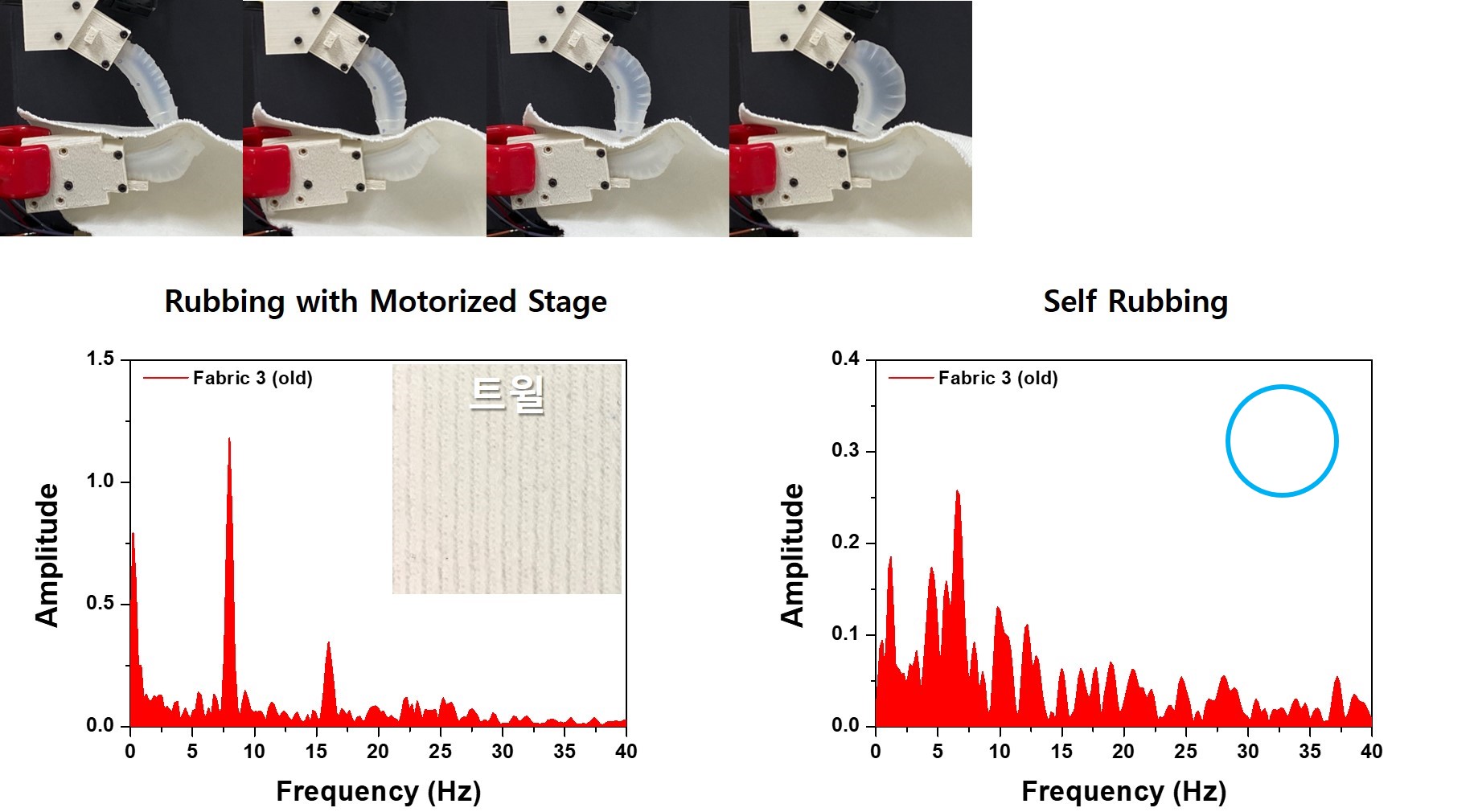
Moreover, the same finger was able sense the surface texture of the clothes. (With motorized stage)
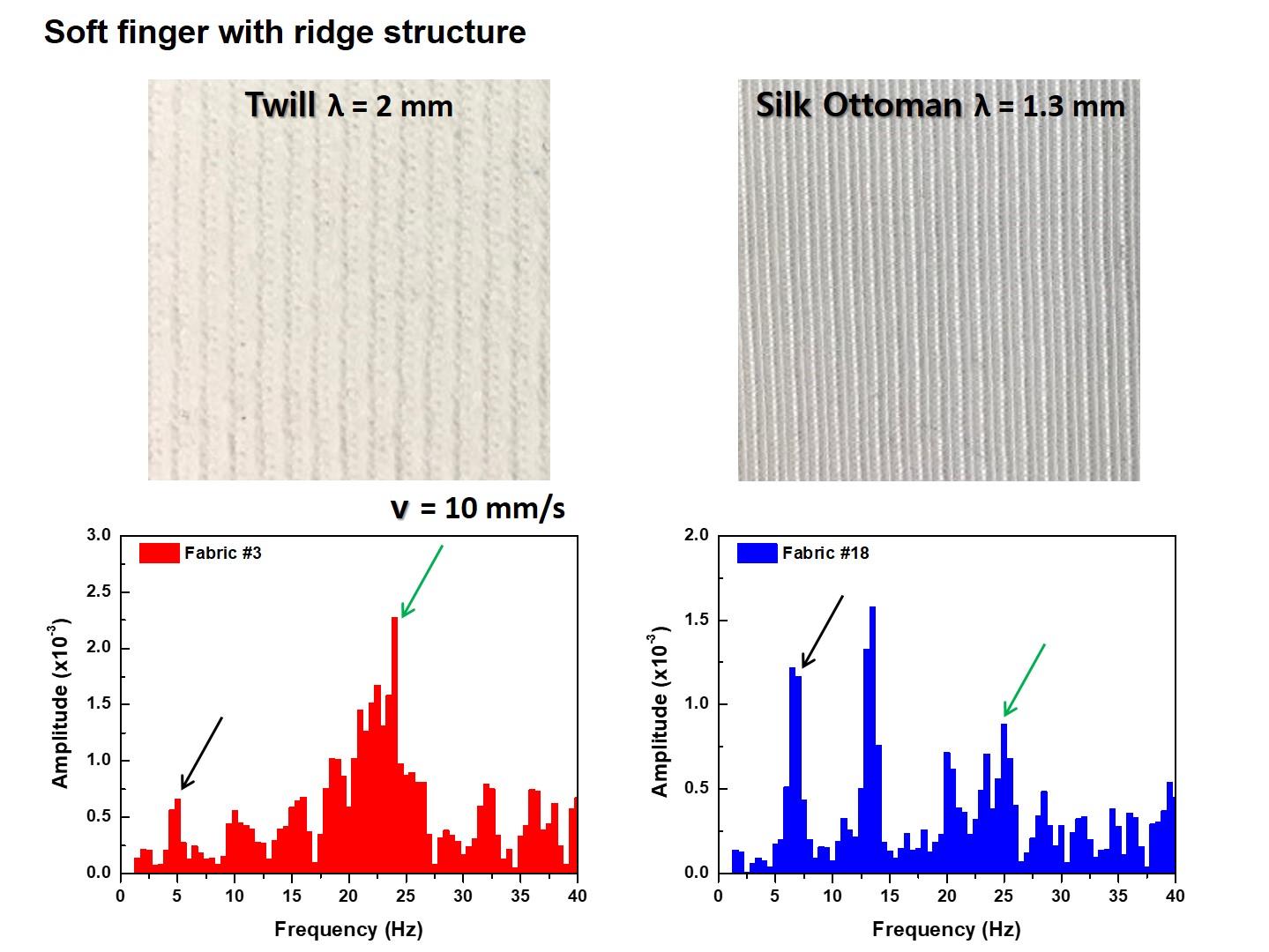
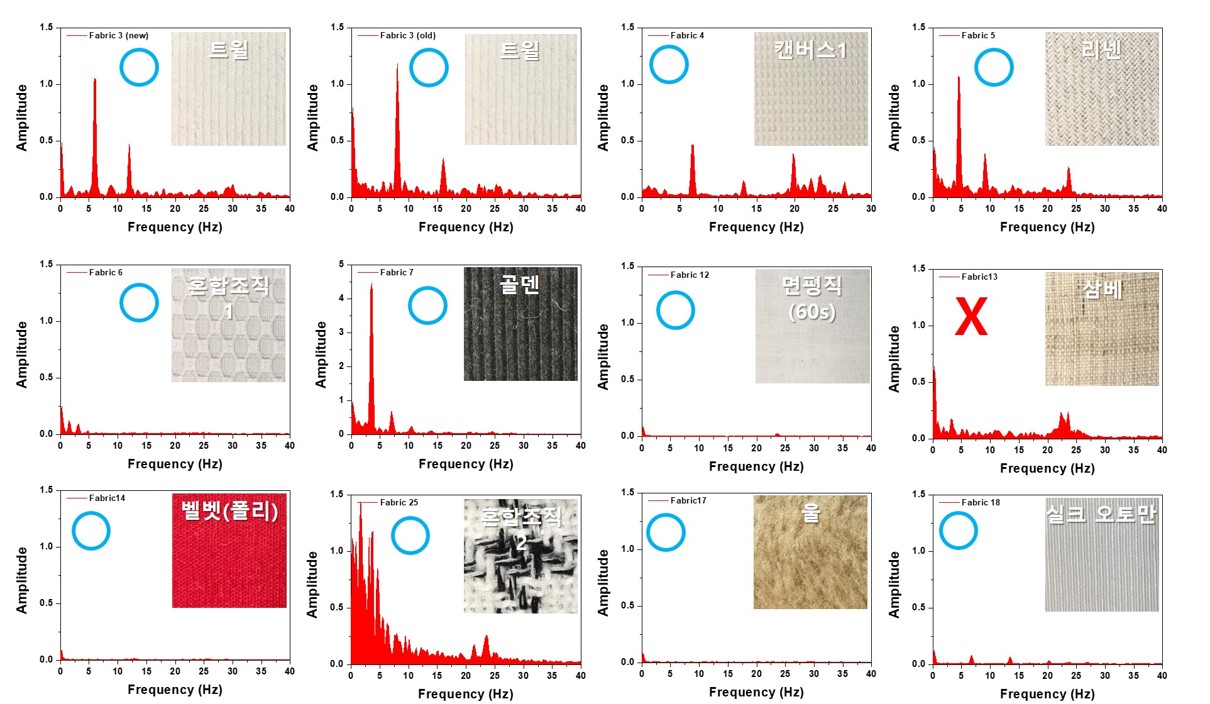
Finger was able to sense the surface texture of the clothes ITSELF.
Connecting the soft finger to an soft arm
CAPTCHA PROJECT - Personal Project
Used the same images that "Keras (OCR model for reading Captchas))" used
Motivation: Understanding Machine Learning theoretically and implementing the idea through python to acquire practical machine learning techniques.
Promblem: Small amount of data sets that caused over fitting and low accuracy.
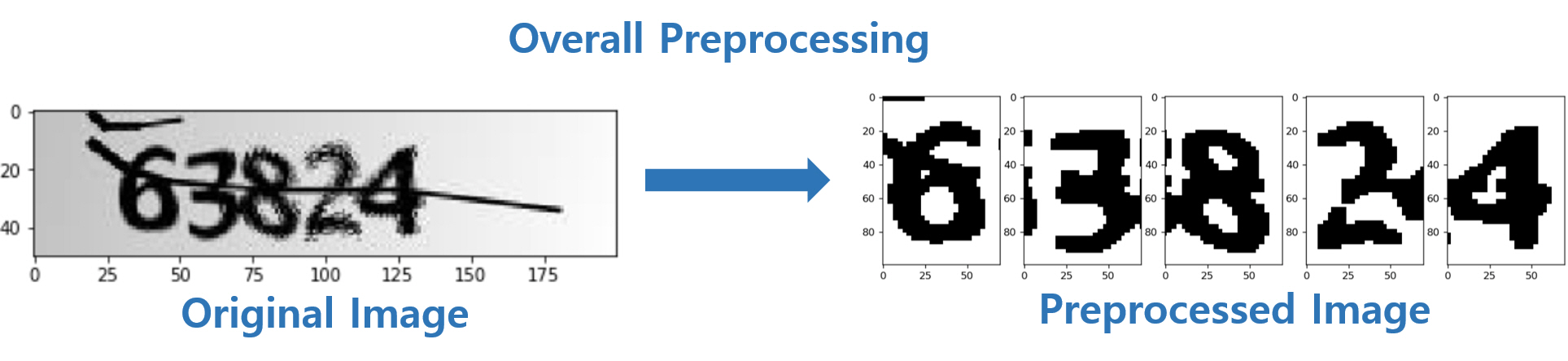
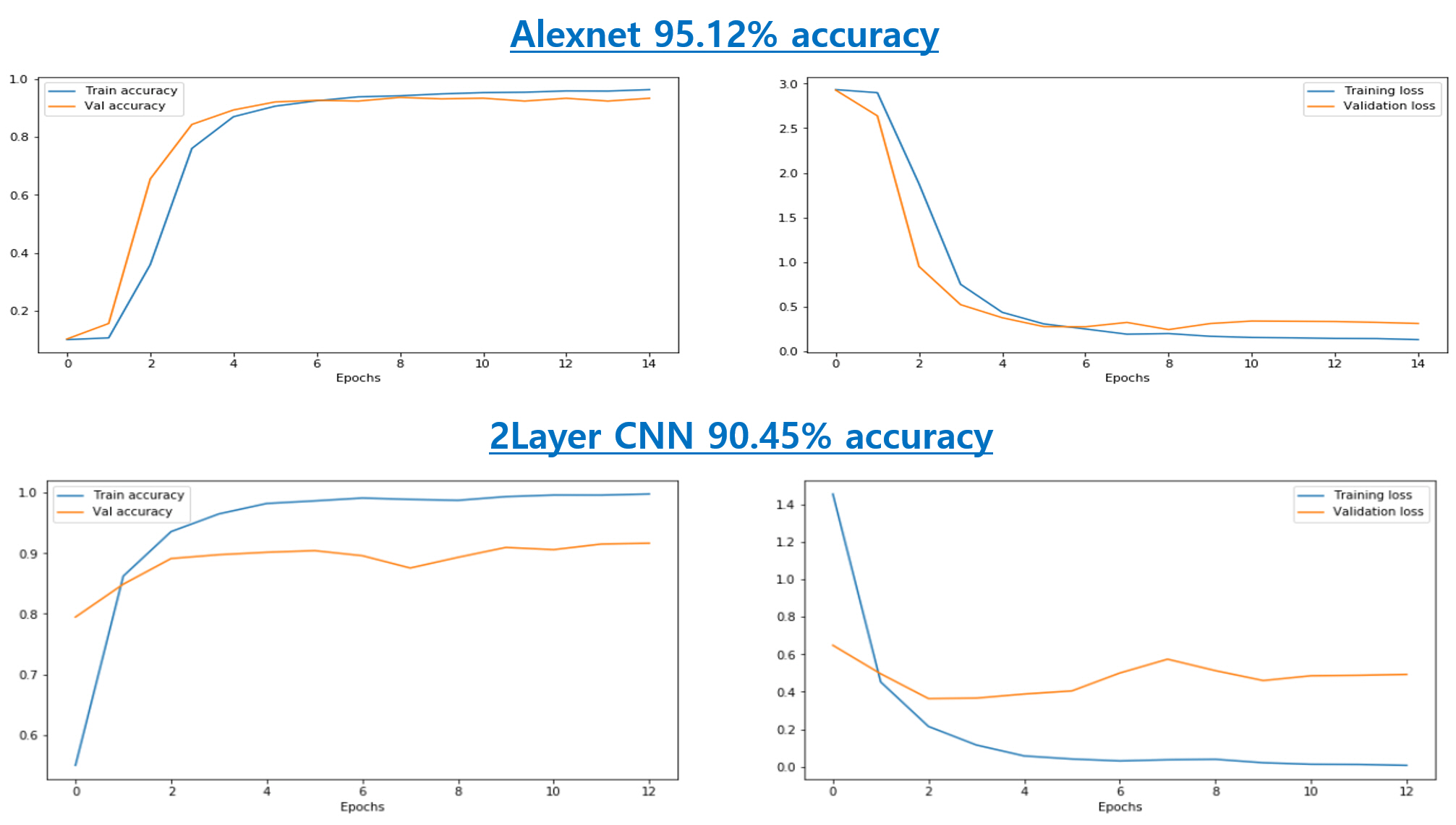
Idea & Solution: In order to use this model in every other CAPTCHA images, I thought of slicing the image into single characters and train each of them into 36(number of alphabets + 0~9 numbers) classes. Also, through data augmentation, I multiplied training data to prevent over fitting and improve accuracy to 93%.
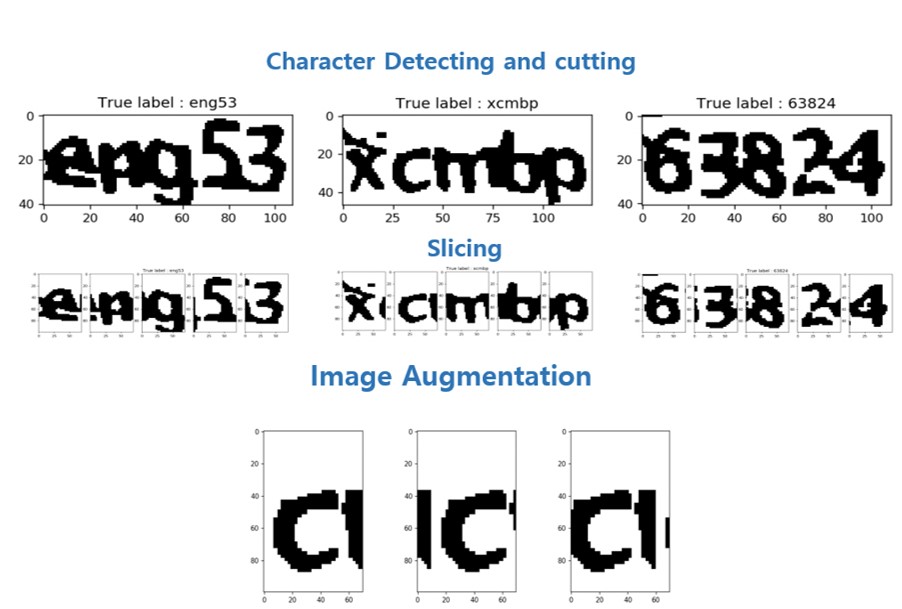
Result
LU Research Group Undergraduate Research Assistant

T. Ha, J. Tran, S. Liu, H. Jang, H. Jeong, R. Mitbander, H. Huh, Y. Qiu, J. Duang, R. Wang, P. Wang, A. Tandon, J. Sirohi, N. S. Lu*, Advanced Science, 1900290, May 2019
• Design the circuit for the bluetooth layer stretchable.
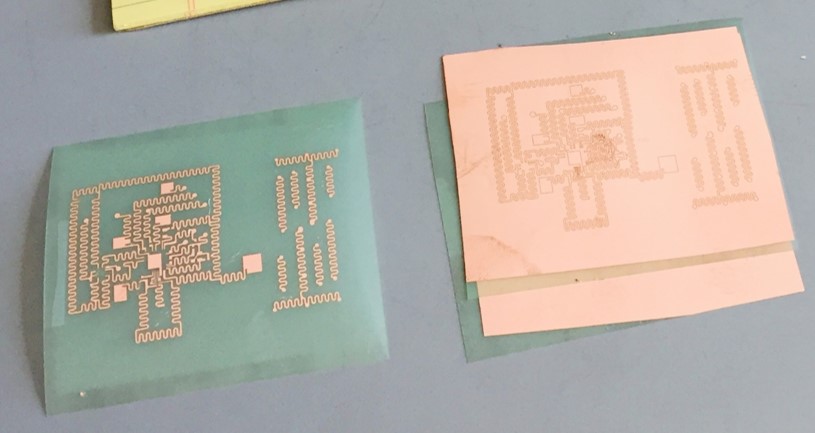
• Soldering